В предыдущей части был намечен план дальнейших действий по изучению принципов управления шпиндельным двигателем. Автор почему-то принял решение начать реализацию с пункта 3. Встречаем нового персонажа данного повествования:
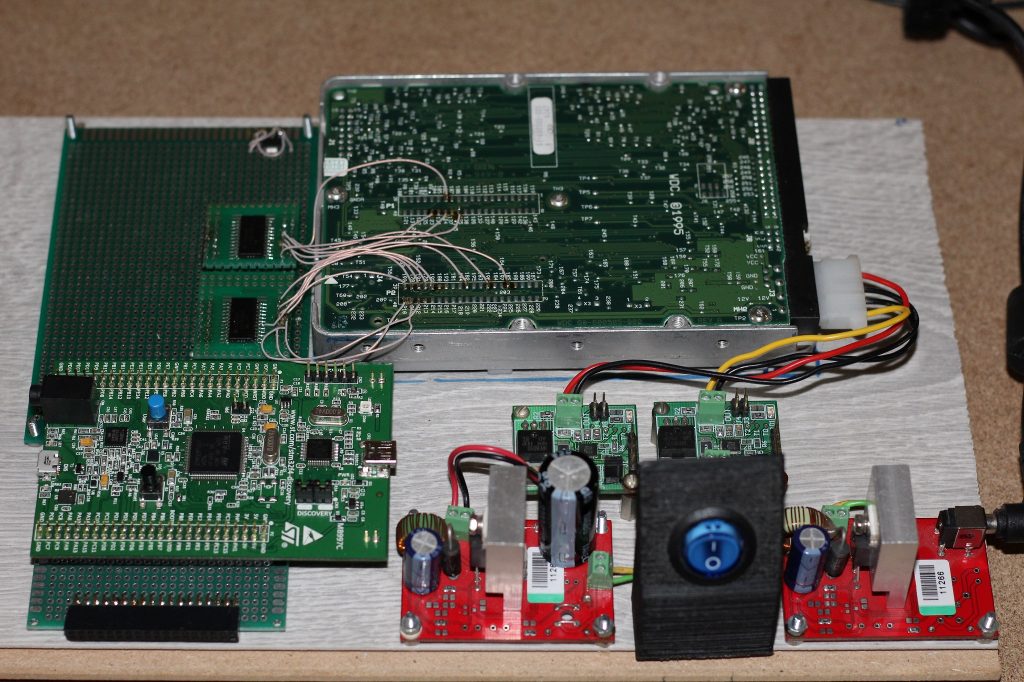
Макет WD21000 + STM32F4-Discovery
Это испытательный макет с платой WD21000, установленной на часть жесткого диска, от которого оставлен только шпиндельный двигатель; процессором STM32, в виде отладочной платы и двух микросхем- переходников логического уровня 74LVC4245. Плюс еще установлено питание 5 и 12 вольт. Схема подключения показана ниже:
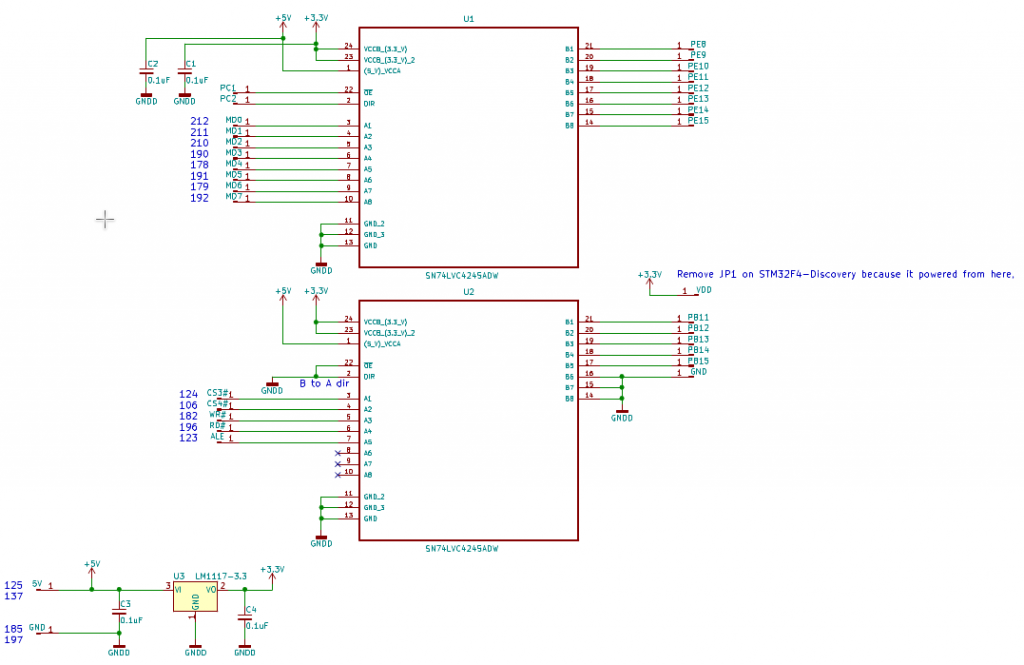
Принципиальная схема макета
В прошлой части обнаружил, что уровни напряжения цифровых сигналов 5 вольт. Закупил переходники напряжения 74LVC4245. Собрал макетную плату с переходниками — на фотографии зеленая с дырочками. Плата STM32F4-Discovery подключается к плате жесткого диска через этот переход. Напомню, что с платы жесткого диска отпаяны процессор с периферией, которая будет заменена на процессор STM32.
Еще обновлена схема самого жесткого диска, а ее исходник закачан на гитхаб.
В следующей части вернемся к пропущенным пунктам плана и попробуем:
1) сканировать цифровым анализатором обращения к контроллеру шпинделя,
2) посмотреть эти места в коде прошивки управления при помощи дизассемблера.
Для большей наглядности, я сделаю эти пункты в виде видеоролика на нашем канале.
Не забывайте делать бэкап. До новых встреч!
PS. Все публикации этой серии доступны по метке «WD21000».